¶
Les ports parallèles d'E/S¶
Caractéristiques générales¶
-
L'Arduino UNO dispose de 23 broches d'E/S, organisées en 3 ports parallèles numériques
- ce sont les ports B, C et D
- port B : broches numériques 8 à 13
- port C : broches analogiques (0 à 5)
- port D : broches numériques 0 à 7
-
Ils sont tous bidirectionnels
- le port C peut aussi être utilisé comme « port d'entrée analogique » (CAN)
- Leurs lignes peuvent être configurées/utilisées individuellement
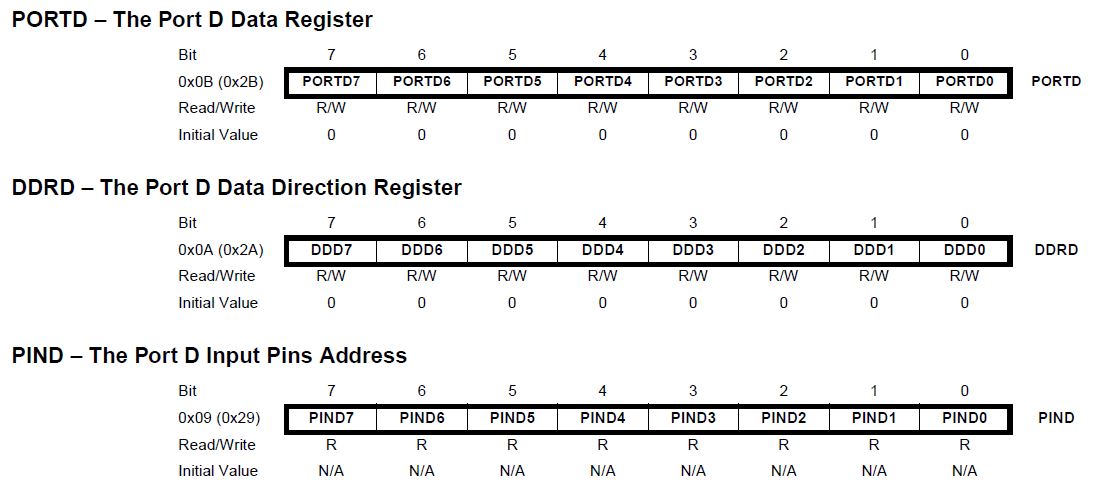
Registres de contrôle des ports¶
- Chaque port x (pour B, C ou D) est contrôlé par 3 registres
- DDRx : le registre de direction (sens de transfert) du port
- PORTx : le registre de donnée du port
- PINx : le registre d'entrée du port
- Chacun de leur bit contrôle une ligne particulière du port
- exemple : le port B regroupe les broches numériques 8 à 13
- le bit 0 de ses registres est donc associé à la broche numérique 8
Fonction des registres¶
- Seuls PORTx et DDRx se comportent vraiment comme des variables mémoires
- un composant mémoire leur ait associé, qui joue le rôle de verrou (=latch)
- les écritures dans ces registres sont donc persistentes
-
PINx n'est pas un composant mémoire
- il est directement connecté aux lignes du port x, et traduit donc leur tension
-
DDRx : détermine la direction de chaque broche du port x
- 0 pour une Entrée, 1 pour une Sortie (« 0/1 » pour « E/S »)
- PORTx
- pour les broches en sortie : 0 pour tension basse, 1 pour tension haute
- pour les broches en entrée : 1 pour activer la résistance « pull-up », 0 sinon
- PINx
- indique la tension des broches : 0 pour tension basse, 1 pour tension haute
Les timers¶
Qu'est-ce que c'est ?¶
Définition¶
Définition : Timer
- C'est un périphérique matériel destiné à compter :
- soit des évènements extérieurs, potentiellement non-périodiques : c'est sa fonction de compteur ;
- soit des évènements internes périodiques (tops d'horloge) : c'est sa fonction de temporisateur, de mesure le temps.
- Tant qu'il est « activé », un timer compte. C'est sa fonction : il s'incrémente chaque fois qu'il détecte un nouvel évènement.
En cas de débordement, il reprend à 0 (sauf mode de fonctionnement particulier), comme n'importe quelle variable C de type entier non-signé. - Un timer sert généralement à :
- mesurer des durées
- déclencher périodiquement des routines d'interruptions
- générer des signaux MLI
Composition d'un timer type¶
- des broches :
- d'entrée : pour compter ses changements d'états ; ce sont les « évènements externes » que le timer peut compter ;
- de sortie : pour signaler que le compteur a atteint une valeur particulière ;
- un sélecteur : sélectionne l'entrée dont les changements d'états (évènements) seront comptés, en général :
- l'horloge interne
- ou une broche externe ;
- un prédiviseur :
- dans le cas ou le compteur est connecté à l'horloge, il est possible de ralentir le comptage en ne comptant qu'1 top d'horloge sur n ;
- n : c'est le prédiviseur. Il est généralement choisi parmi un ensemble de puissances de 2, par exemple : {1, 16, 64, 256} ;
- un registre de comptage : c'est lui qui stocke la valeur de comptage ;
- des unités de comparaison, chacune munie d'un registre de comparaison : ces registres contiennent une valeur destinée à être comparée à celle du compteur ; dans le but de changer l'état d'une broche de sortie de l'unité de comparaison, ou de déclencher une interruption ;
- des registres de contrôle : pour configurer son mode de fonctionnement.
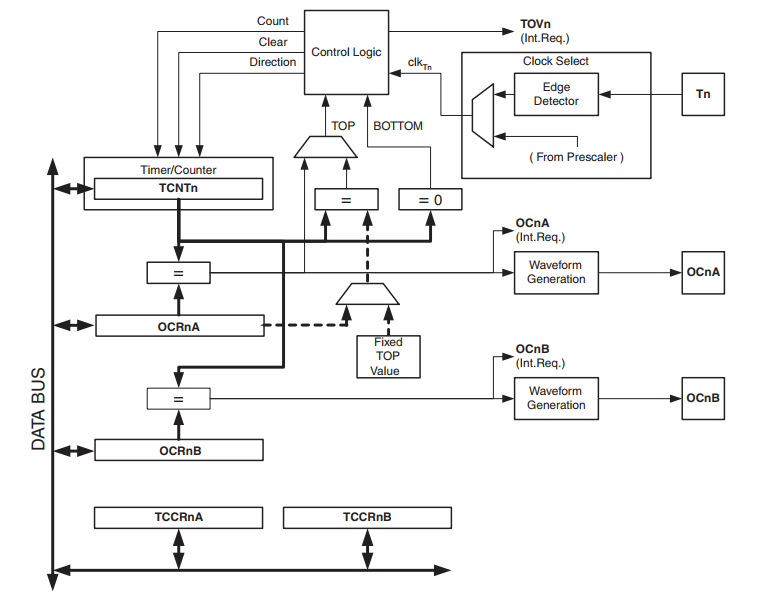
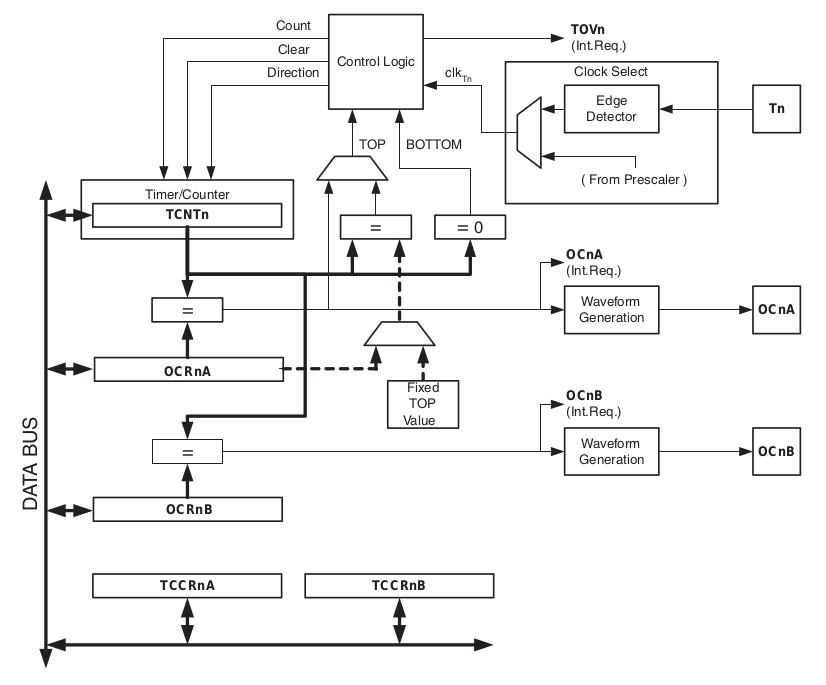
Le timer 0 de l'ATmega328¶
Schéma du timer 0 de l'ATmega328¶
Deux principaux modes de fonctionnement¶
Mode normal¶
- le timer compte tout le temps, c'est-à-dire qu'il s'incrémente à chaque « évènement » détecté, qui peuvent être au choix :
- les tops d'horloge prédivisés, en mode temporisateur,
- les changements d'état de sa broche d'entrée, en mode compteur ;
- il revient naturellement à 0 après un débordement (overflow).
- il peut déclencher une interruption de débordement :
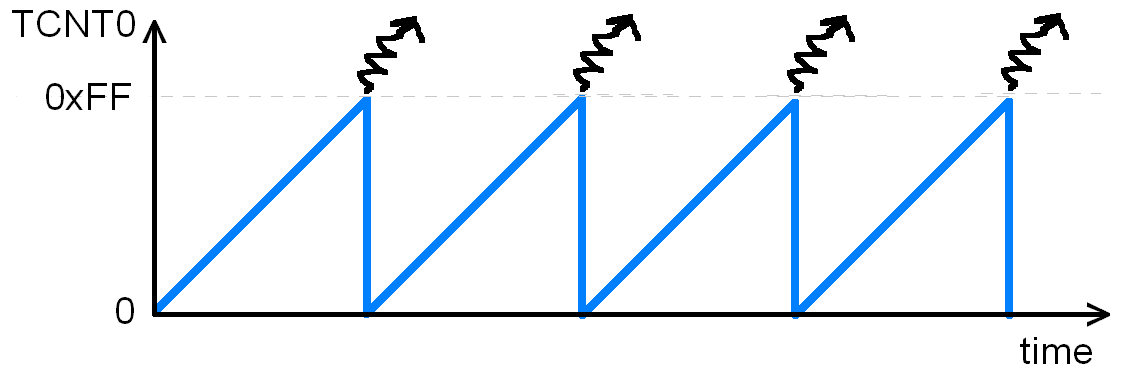
- Lorsque le timer compte les tops d'horloge prédivisés (fonction temporisateur), la durée (période) de ses cycles est définie par :
T_cycle_normal = prédiviseur/fcpu * 256
Mode remise à zéro sur comparaison¶
- C'est le mode CTC : Clear Timer on Compare match
- Le domaine de comptage est raccourci : le timer évolue de 0 à la valeur du registre de comparaison A, puis revient à 0
- le test de comparaison peut aussi déclencher (outre le reset du compteur) :
- une interruption de comparaison A (différente de celle de débordement ! et de celle de comparaison B)
- un changement d'état de la broche de sortie OC0A
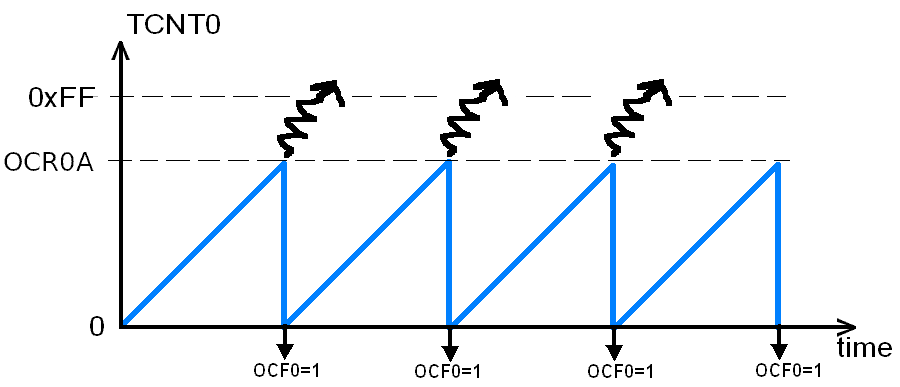
- Dans ce mode, + fonction temporisateur, la durée du cycle est :
T_cycle_CTC = préd./fcpu * (OCR0A+1)
Génération de signal carré en mode CTC¶
- La broche de sortie OC0A (= broche du timer 0 associée à la comparaison A) peut s'inverser à chaque comparaison :
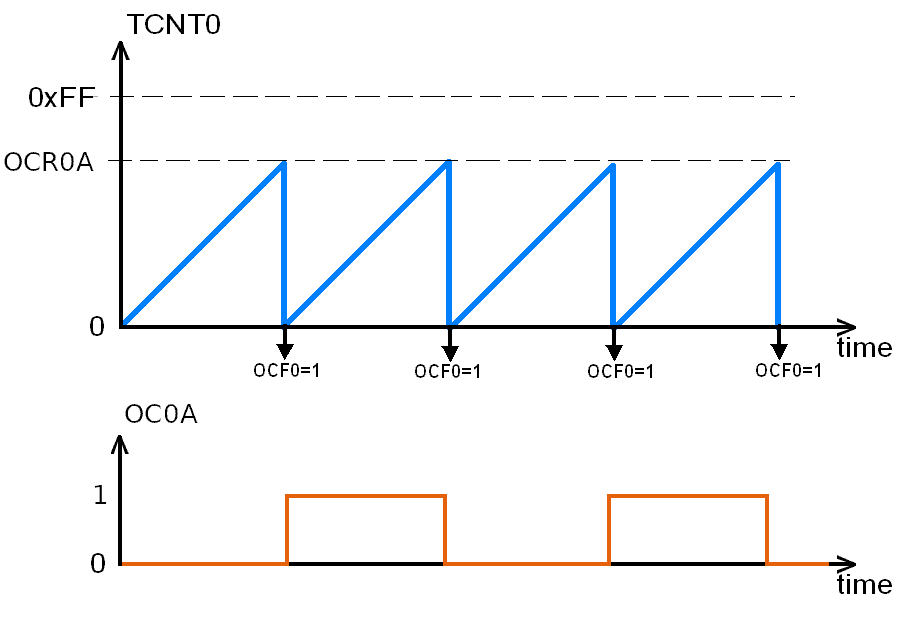
- Cela permet la génération d'un signal carré de période double de celle du cycle de comptage :
T_signal_sortie_CTC = 2*préd./fcpu * (OCR0A+1)
Les registres du timer 0¶
Registre de comptage du timer 0 : TCNT0¶

- C'est un registre 8 bits : le timer 0 est donc un timer 8 bits.
- on veillera à l'initialiser à 0 si l'on souhaite que son premier cycle soit complet.
Registre de comparaison A du timer 0 : OCR0A¶

- C'est aussi un registre 8 bits (son domaine de valeurs est identique à celui du registre de comptage)
- en cas d'égalité avec le contenu du registre de comptage, une interruption peut être demandée, et l'état de la broche de sortie OC0A peut être inversée.
- il existe une seconde unité de comparaison, appelée B, construite sur le même modèle ; elle dispose donc aussi :
- d'un registre de comparaison :
OCR0B, qui permet de définir une seconde valeur de comparaison ; - d'une source d'interruption propre (l'interruption de comparaison B) ;
- d'une broche de sortie propre : OC0B.
- d'un registre de comparaison :
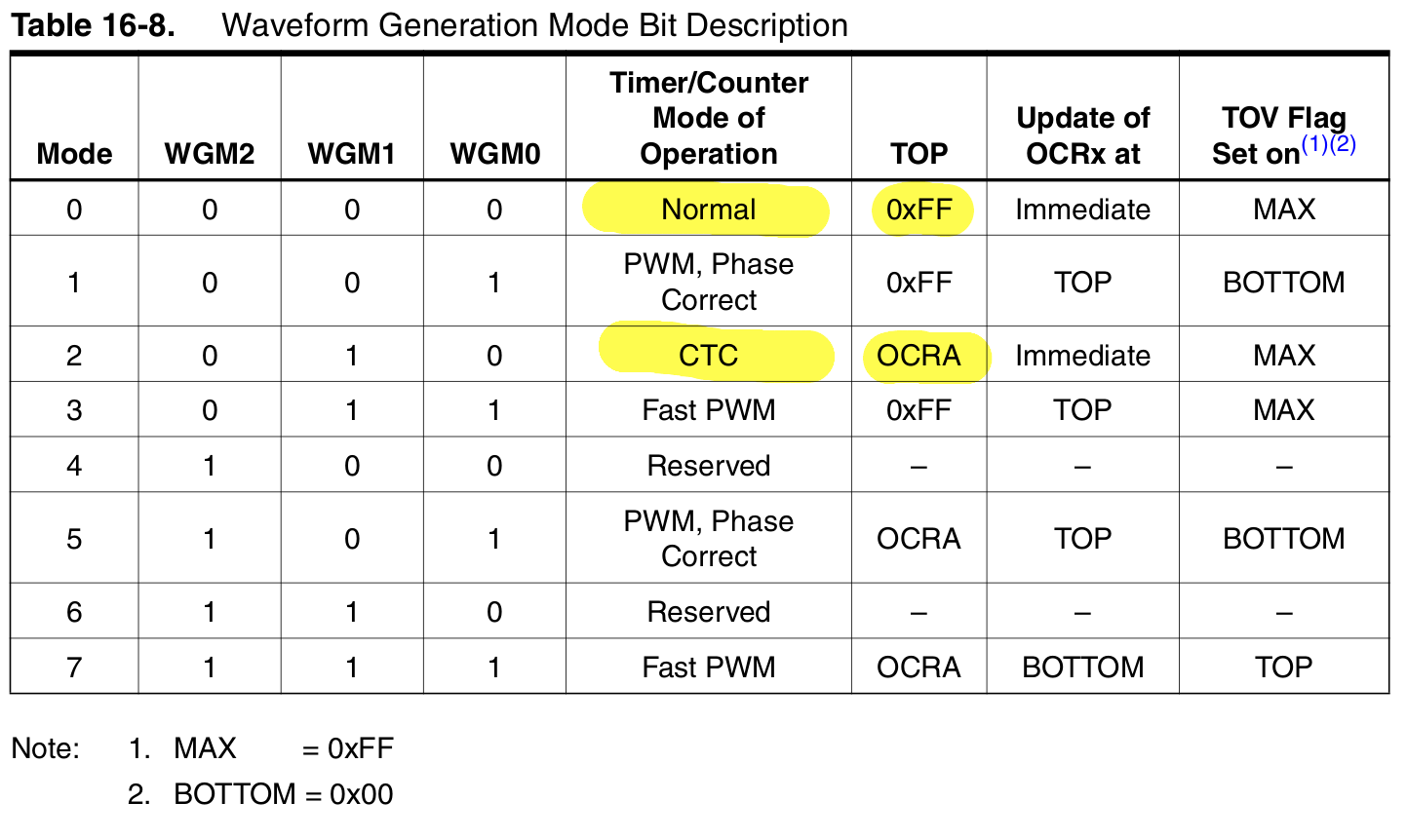
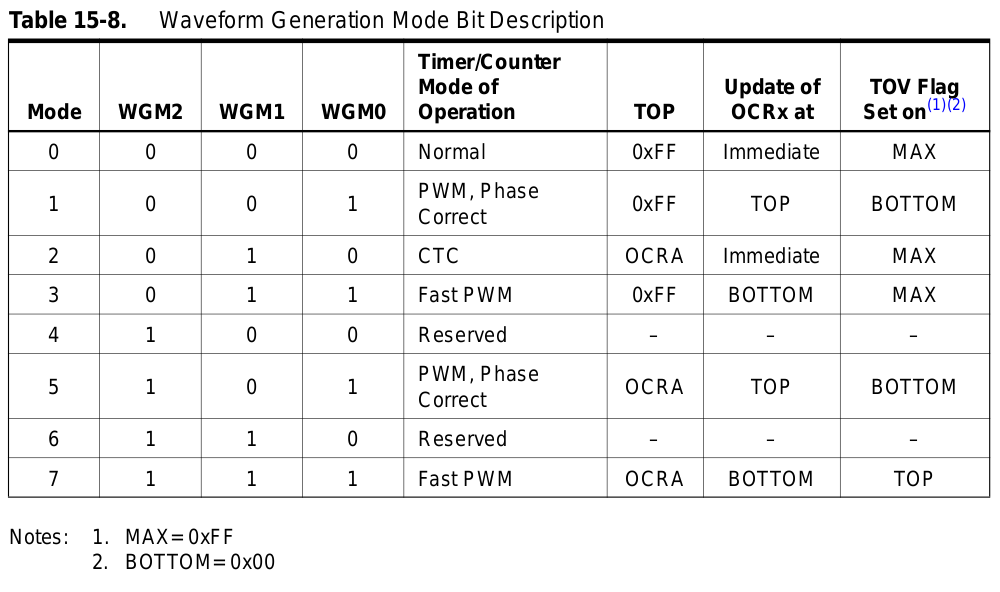
Registre de contrôle A du timer 0 : TCCR0A¶

- Les 2 bits de poids faibles sont utilisés - avec le bit WGM02 de l'autre registre de contrôle - pour définir le mode de fonctionnement du timer (dont son sens de comptage) :
Registre de contrôle A du timer 0 (suite) : TCCR0A¶

-
Les 2 bits de poids forts - COM0A1 et COM0A0 - sont utilisés pour émettre un signal sur la broche de sortie associée à la comparaison A - OC0A - dont la forme évolue lorsque le compteur prend la valeur du registre de comparaison A
-
En mode normal ou CTC, ces 2 bits peuvent être réglés ainsi :
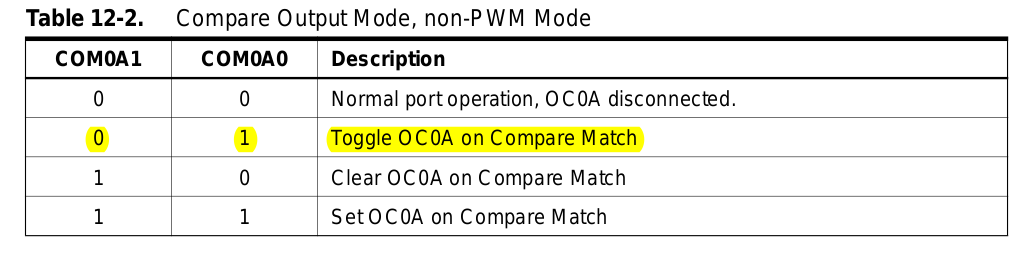
-
L'inversion (toggle) permet de généré le signal carré illustré plus haut
-
Les 2 bits suivants concernent la comparaison avec le second registre de comparaison - B - et ne sont pas décrits ici
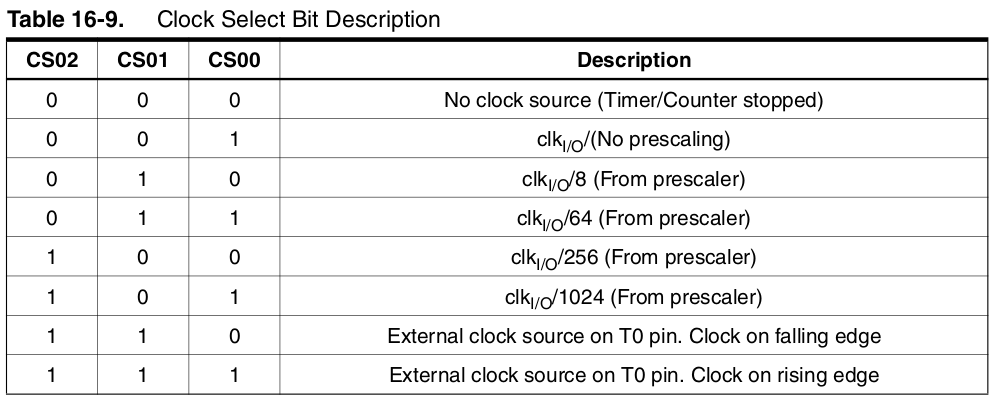
Registre de contrôle B du timer 0 : TCCR0B¶

Il complète le registre précédent :
- pour la définition du mode de fonctionnement, cf. tableau ci-dessus.
- pour la sélection du signal « pris en compte »
- soit un signal d'entrée sur la broche T0 (fonction compteur)
- soit un signal d'horloge, avec son prédiviseur (temporisateur)
Registre d'interruption du timer 0 : TIMSK0¶

Il permet d'activer/désactiver individuellement les 3 sources d'interruption du timer 0 :
TOIE0: autorisation de l'interruption de débordementOCIE0A: autorisation de l'interruption de comparaison AOCIE0B: autorisation de l'interruption de comparaison B
Programmation du timer 0 : procédure à suivre¶
- Spécifier le mode de fonctionnement du timer (cf.
TCCR0A,TCCR0B), parmi ceux vus ici :- mode normal
- mode remise à zéro sur comparaison (CTC)
- Spécifier le mode temporisateur, avec la période d'interruption souhaitée :
- choix du prédiviseur (cf.
TCCR0B) - calcul de la valeur de comparaison, si mode CTC(cf.
OCR0A)
- choix du prédiviseur (cf.
- Autoriser l'interruption souhaitée (cf.
TIMSK0)- soit celle de débordement, si mode normal
- soit celle de comparaison, si mode CTC
- Reset du registre de comptage (
TCNT0 = 0)- si l'on souhaite un 1er cycle complet (sachant qu'après la 1ère comparaison/débordement, le registre est forcément remis à zéro)
Le timer 2 de l'ATmega328¶
Un timer proche du timer 0¶
Des fonctions similaires, mais avec qqs différences¶
-
Tous les registres du timer 0 existent pour le timer 2, avec un fonctionnement globalement identique.
-
Leurs noms sont les mêmes, en dehors du numéro du timer. Par exemple, le registre de comparaison A s'appelle
OCR0Adans le timer0, etOCR2Adans le timer2. -
Nous voyons ici les différences qui nous importent (c.-à-d. pour les modes de fonctionnements normaux et CTC).
Registre de contrôle A du timer 2 : TCCR2A¶

Il ne se paramètre pas exactement comme le registre TCCR0A :
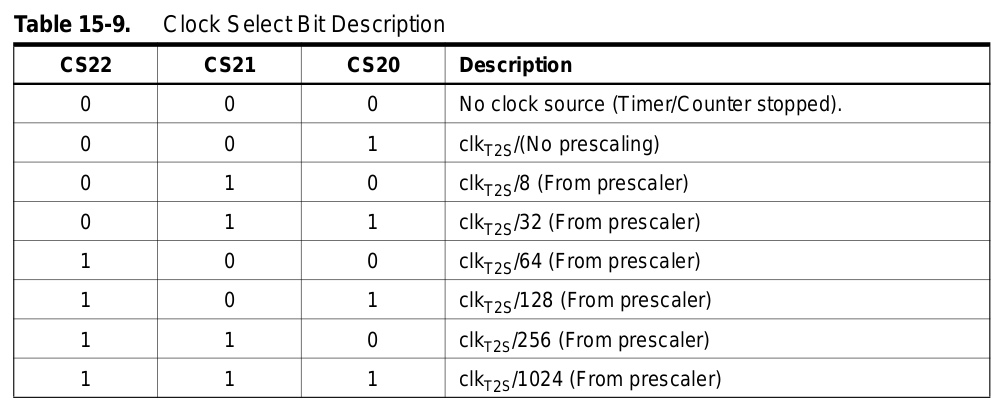
Registre de contrôle B du timer 2 : TCCR2B¶

Là encore, il y a des différences, sur les prédiviseurs disponibles :